理解go语言编程-网络编程
TCP链接:
conn, err := net.Dial(“tcp”, “192.168.0.10:2100”)
UDP链接:
conn, err := net.Dial(“udp”, “192.168.0.12:975”)
ICMP链接(使用协议名称):
conn, err := net.Dial(“ip4:icmp”, “www.baidu.com“)
ICMP链接(使用协议编号):
conn, err := net.Dial(“ip4:1”, “10.0.0.3”)
在成功建立连接后,我们就可以进行数据的发送和接收。发送数据时,使用conn的Write()成员方法,接收数据时使用Read()方法。
Dial()函数是对DialTCP()、DialUDP()、DialIP()和DialUnix()的封装.
验证IP地址有效性的代码如下: func net.ParseIP()
创建子网掩码的代码如下:
func IPv4Mask(a, b, c, d byte) IPMask
获取默认子网掩码的代码如下:
func (ip IP) DefaultMask() IPMask 根据域名查找IP的代码如下:
func ResolveIPAddr(net, addr string) (*IPAddr, error)
func LookupHost(name string) (cname string, addrs []string, err error);
net/http包的Client类型提供了如下几个方法,让我们可以用最简洁的方式实现HTTP请求:
func (c *Client) Get(url string) (r *Response, err error)
func (c *Client) Post(url string, bodyType string, body io.Reader) (r *Response, err
error)
func (c *Client) PostForm(url string, data url.Values) (r *Response, err error) func (c *Client) Head(url string) (r *Response, err error)
func (c *Client) Do(req *Request) (resp *Response, err error)
http.Get()方法,等价于http.DefaultClient.Get()。


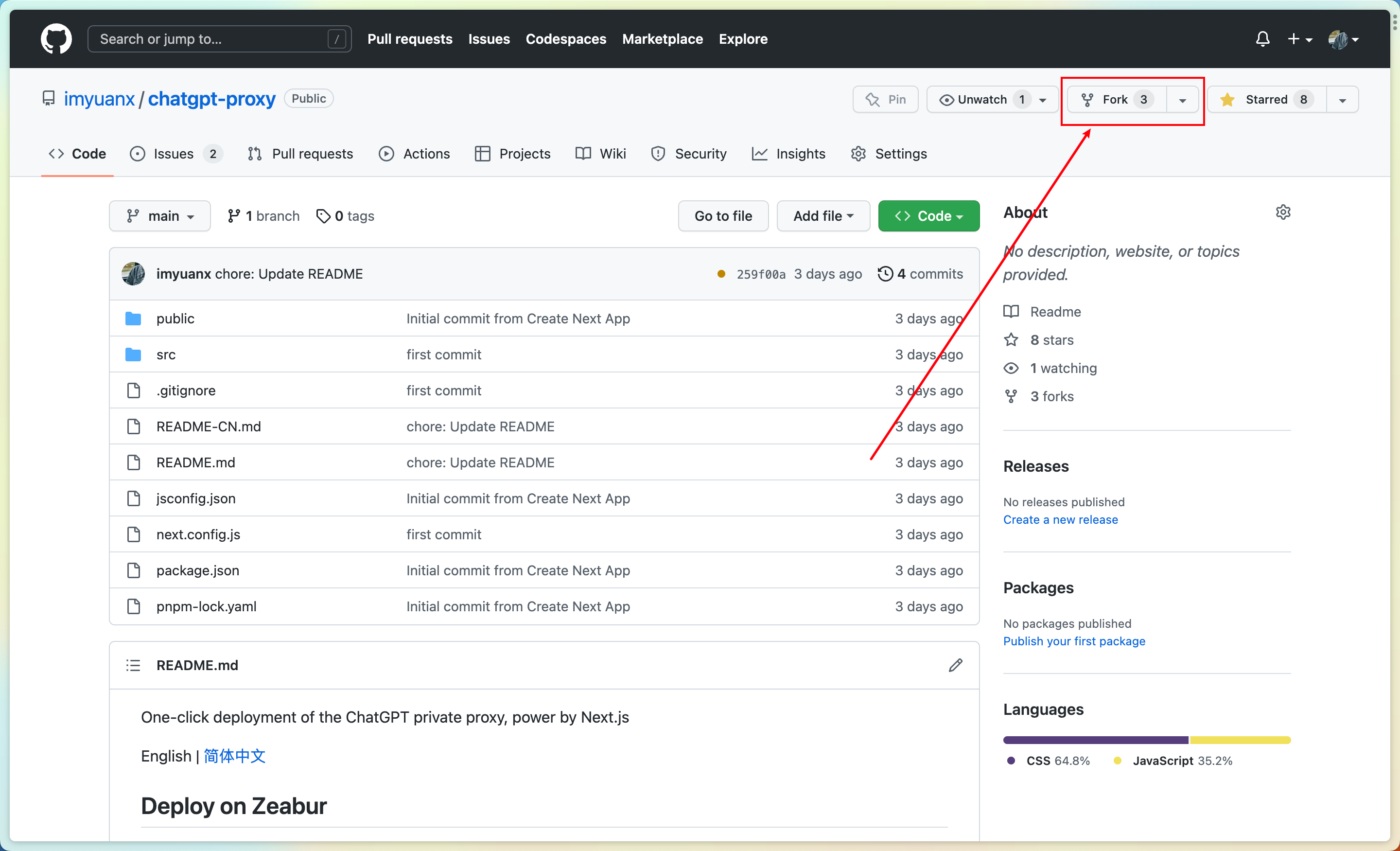 2. 在 [Zeabur](https://zeabur.com) 部署你的仓库
3. 在 [Zeabur](https://zeabur.com) 控制台新增一个服务
2. 在 [Zeabur](https://zeabur.com) 部署你的仓库
3. 在 [Zeabur](https://zeabur.com) 控制台新增一个服务