初学PX4之大体构架
PX4源代码
PX4项目建立在这些主要软件模块:
PX4 Flight Stack (estimation and control, cross-platform)
PX4 Middleware (IPC / ORB, *nix (NuttX, Linux, MacOS, etc))
PX4 ESC Firmware (for motor controllers)
PX4 Bootloader (for STM32 boards)
Operating System (NuttX or Linux/Mac OS)
项目地址:
PX4飞行栈
PX4飞行栈能控制多轴飞行器,航模,直升机,实验飞机和地面车辆的飞行。它由一组单独的应用程序/节点组成。
PX4中间件
PX4中间件提供了硬件接口和进程间通信。
PX4电调固件
PX4电调固件控制无刷电机,可以通过UAV CAN进行交互。
PX4 Bootloader
PX4引导装载程序是用于STM32微控制器新飞行软件加载到闪存。用于Pixhawk。
操作系统
PX4飞行栈和中间件可以在微控制器Nuttx小型操作系统上执行,或者在全面POSIX系统,如Linux,Mac OS 或 BSD。
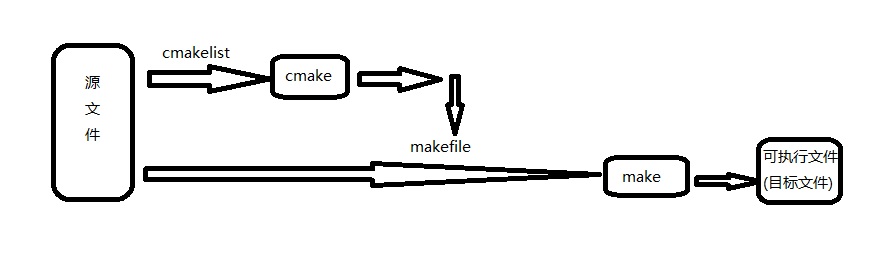
Tip:px4编译系统使用的是cmake,关于cmake与make的区别见CMake与Make
# 代码运行分析 >关于系统的启动过程请查看我之前文章里的[系统启动](/2015/12/RTOS-of-px4#1-3)。
知道了系统的启动过程,那么就知道代码运行的思路基本上就是脚本rcS的写法了,如果你想深入了解NSH启动脚本的自定义,可以参考定制NSH初始化,所以下面就从脚本开始看起。
首先通过sercon开启串口驱动CDC/ACM,这样才能打印出下面echo出的串口信息。
设置模式为自动启动。
再设置文件路径如下
1 | set FRC /fs/microsd/etc/rc.txt |
挂载microSD卡"mount -t vfat /dev/mmcsd0 /fs/microsd",如果/dev/mmcsd0不存在,还要创建文件系统"mkfatfs /dev/mmcsd0",这里边调用了tone_alarm应用来根据声音判断,这个应用可以在源代码里找到,如果你使用了Qt creator,你可以这样搜到它。
可以看出函数的原定义是这样的,借助于IDE可以很快的查出应用程序的来龙去脉,后面碰到的应用都可以这样去查看。

接着分析,接下来很关键的一步,检查是否存在`/fs/microsd/etc/rc.txt`,如果存在,执行它,设置模式被设置为自定义,否则为默认的自动启动。一般情况是没有的,因为etc/rc.txt文件的创建将完全禁用内置启动进程,高级用户可以这样做而已。
然后就是自动启动的一些东西。
- 由
nshterm /dev/ttyACM0 &启用/dev/ttyACM0串口;
- 启动uorb;
- 载入
/fs/microsd/params里的参数(一般是由mtd将其载入ram中,然后路径变为/fs/mtd_params),param应用功能比较多,如select select/select load/select compare; - 对比参数RC_MAP_THROTTLE、RC_MAP_ROLL、RC_MAP_PITCH、RC_MAP_YAW并保存默认值;
- 启动系统状态指示灯;
- 设置这些参数的默认值,一般为none;
- 判断SYS_AUTOCONFIG,设置AUTOCNF为yes;
- 根据板子型号设置USE_IO;
- SYS_AUTOSTART设置,启动
/etc/init.d/rc.autostart脚本,从nsh里可以看到,在这个脚本里调用机身配置文件; - 打开用户设置文件
etc/config.txt设置参数,如果存在的话; - 保存参数;
- crc校验
/etc/extras/px4io-v2.bin是否需要更新及启动px4io打开电机是否安全; - 设置输出模式OUTPUT_MODE;
- 启动航点存储;
- 启动传感器
/etc/init.d/rc.sensors、GPS; - 开始主输出TTYS1_BUSY;
- 启动commander;
- 检查UAVCAN是否可用;
- 根据OUTPUT_MODE,启动px4io,运行
/etc/init.d/rc.io、fmu、mkblctrl、pwm_out_sim; - 开启mavlink;
- 运行
/etc/init.d/rc.uavcan; - 运行
/etc/init.d/rc.logging; - 根据VEHICLE_TYPE启动设置(如四轴:
rc.interface/rc.mc_apps),姿态估计、控制算法在/etc/init.d/rc.interface里,mixer导入在/etc/init.d/rc.mc_apps里; - 启动导航navigator;
- 运行etc/extras.txt;
自启动完后告诉MAVLink app启动完成;启动光流;
下面就可以单独的研究应用软件了。
总个程序运行的框架如下:

下面给出一个大神的图:
参考文件:[PX4 Source Code](https://pixhawk.org/firmware/source_code)/[Nuttx系统启动](http://blog.chinaunix.net/uid-29786319-id-4393303.html)/[NuttX 编译系统](http://blog.csdn.net/zhumaill/article/details/24400441)