Moveit在ROS Kinetic上的搭建与调试
环境搭建
参考官网,注意这里需要采用Ubuntu15.10或者16.04。
具体命令简写如下:
1 | sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
基础ROS操作教程
开始基本操作。
基础环境
首先是配置ROS的工作环境,创建新的工作空间。
1 | rosws init ~/kinetic_workspace /opt/ros/kinetic |
为new package创建目录。
1 | mkdir ~/kinetic_workspace/sandbox |
环境确认。
1 | echo $ROS_PACKAGE_PATH |
正常情况下会出现如下类似的结果。
1 | /home/your_user_name/fuerte_workspace/sandbox:/opt/ros/fuerte/share:/opt/ros/fuerte/stacks |
ROS文件系统
下一步为ROS文件系统。
首先确保安装了ros-tutorials包。
1 | sudo apt-get install ros-kinetic-ros-tutorials |
对几个简单的概念做一个快速的浏览,
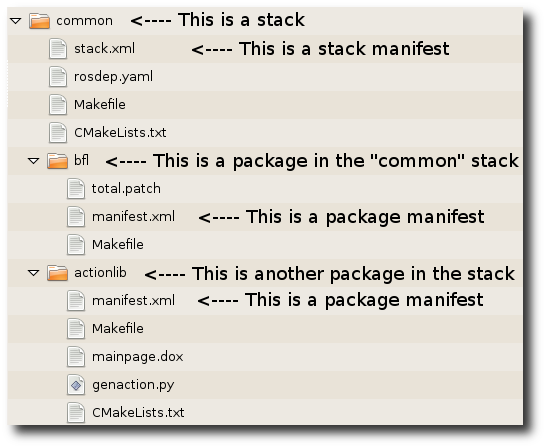
- Packages:包是最低级别的ROS软件组织,它包含了库、工具、可执行文件等。
- Manifest: 清单是对包的描述,它最重要的作用是定义包之间的依赖关系。
- Stacks:堆栈是构成更高级别库的包的集合。
- Stack Manifest: 这些就像正常的清单,但是是用于堆栈的。
包是具有manifest.xml文件的目录,堆栈是一个具有stack.xml文件的目录。
文件系统工具,代码分布在许多ROS包和堆栈中。使用命令行工具(如ls和cd)导航可能非常乏味,这就是为什么ROS提供了帮助你的工具。
rospack和rosstack允许您获取有关包和堆栈的信息。在本教程中,我们只讨论find选项,它返回包或堆栈的路径。实际用法如下:
1 | $ rospack find [package_name] |
roscd是rosbash套件的一部分。它允许您将目录(cd)直接更改为包或堆栈,使用roscd可以直接跳到工作目录。查看当前路径可以直接使用UNIX命令pwd,实际用法如下:
1 | $ roscd [locationname[/subdir]] |
roscd log将带您到ROS存储日志文件的文件夹。
rosls是rosbash套装的一部分。它允许您直接在包,堆栈或公共位置通过名称,而不是通过包路径使用,实际用法如下。
1 | rosls [locationname[/subdir]] |
注意:这些命令是支持Tab键补全的。
创建ROS Package
这部分涵盖使用roscreate-pkg或catkin创建新软件包,以及使用rospack列出软件包依赖关系。
roscreate的用法:
1 | roscreate-pkg [package_name] |
创建了新的Package后,需要更新一下profile,以便ROS能够找到新的Package。
1 | rospack profile |
查看新建的Package的依赖关系下所示,另外这个也可以在Mainefest里面查到。
1 | rospack depends1 beginner_tutorials |
rospy是Python的客户端库, roscpp是C ++的客户端库。
编译ROS Package
这部分涵盖了构建包的工具链。
一旦安装了所有的系统依赖关系,我们就可以构建我们刚刚创建的包。
rosmake可以编译一个也可以同时编译多个Package,用法如下:
1 | rosmake [package1] [package2] [package3] |
理解ROS节点
这部分介绍ROS图形概念,并讨论使用roscore,rosnode和rosrun命令行工具。
ROS节点可以使用客户端库与其他的节点进行沟通,节点可以发布或订阅主题,也可以提供或使用服务。
ROS客户端库允许以不同编程语言编写的节点进行通信。
roscore是使用ROS时应该运行的第一件事。
运行命令如下:
1 | roscore |
rosnode显示有关当前运行的ROS节点的信息。 rosnode list命令列出这些活动节点,rosnode info命令返回有关特定节点的信息。
1 | #注意运行该命令是,在另外一个开启的Terminal |
rosrun允许您使用程序包名称直接运行程序包中的节点。用法跟示例如下:
1 | rosrun [package_name] [node_name] |
ROS的一个强大的功能是,您可以从命令行重新分配名称。这时使用rosnode list可以看到运行的节点名称,如果还存在之前关闭的节点命令,意味着你是通过ctr + c关闭的,可以通过rosnode cleanup清除,如下:
1 | rosrun turtlesim turtlesim_node __name:=my_turtle |
我们可以通过另外一个rosnode ping工具检验该节点是否跑起来了。
理解ROS Topics
这部分介绍ROS主题以及使用rostopic和rqt_plot命令行工具。
简单的例子,在两个Termenal分别运行node,然后可以通过方向按键控制海龟的前进方向。
1 | rosrun turtlesim turtlesim_node |
turtlesim_node和turtle_teleop_key节点通过ROS Topic彼此通信。 turtle_eleop_key以topic的形式发布键击,而turtlesim以subscribes的形式接收键击信息。
rqt_graph创建了系统中发生了什么的动态图。rqt_graph是rqt包的一部分。安装该应用程序如下:
1 | sudo apt-get install ros-kinetic-rqt |
使用如下命令可以看出键击控制乌龟的例子的关系动态图。
1 | rosrun rqt_graph rqt_graph |
rostopic echo显示在一个topic上发布的数据。如下:
1 | rostopic echo /turtle1/cmd_vel |
rostopic list返回当前订阅和发布的所有主题的列表。如:
1 | rostopic list -v |
可以使用rostopic type来确定在主题上发送的消息的类型。如下:
1 | #用法 |
rostopic pub将数据发布到当前广告的topic。
1 | rostopic pub [topic] [msg_type] [args] |
rostopic hz报告数据发布的速率。
1 | rostopic hz /turtle1/pose |
我们还可以使用rostopic类型与rosmsg show结合获取有关某个主题的深入信息。
1 | rostopic type /turtle1/cmd_vel | rosmsg show |
rqt_plot显示关于主题发布的数据的滚动时间图。
1 | rosrun rqt_plot rqt_plot |
理解ROS服务和参数
服务是节点可以彼此通信的另一种方式。服务允许节点发送请求并接收响应。
1 | rosservice list |
list命令向我们显示turtlesim节点提供了九个服务:reset, clear, spawn, kill, turtle1/set_pen, /turtle1/teleport_absolute, /turtle1/teleport_relative, turtlesim/get_loggers, and turtlesim/set_logger_level.
1 | rosservice type /clear |
这里我们将调用没有参数,因为服务类型为空:
1 | rosservice call [service] [args] |
再看看一个服务类型不为空的服务例子spawn。
1 | rosservice type /spawn| rossrv show |
rosparam允许您存储和操作ROS参数服务器上的数据。参数服务器可以存储整数,浮点数,布尔值,字典和列表。rosparam使用YAML标记语言进行语法。YAML看起来很自然:1是一个整数,1.0是一个浮点数,one是一个字符串,true是一个布尔值,[1,2,3]是一个整数列表,{a:b,c:d}表示字典。rosparam有很多可以在参数上使用的命令,如下所示:
1 | rosparam set set parameter |
这里会改变红色通道的背景颜色,这改变了参数值,现在我们要调用clear服务使参数更改生效:
1 | rosparam set /background_r 150 |
现在让我们看看param服务器上其他参数的值。让我们得到绿色背景频道的值:
1 | rosparam get /background_g |
我们还可以使用rosparam get /来向我们显示整个参数服务器的内容。
1 | rosparam get / |
您可能希望将其存储在一个文件中,以便您可以在另一时间重新加载它。
1 | rosparam dump [file_name] [namespace] |
手工创建一个ROS包
你的包有一个清单,ROS可以找到它。尝试执行命令:
1 | rospack find foobar |
另外是要创建CMakeLists,才能进行编译。
使用rqt_console和roslaunch
这部分介绍使用rqt_console和rqt_logger_level进行调试的ROS,以及一次性启动多个节点的roslaunch。
rqt_console附加到ROS的日志框架以显示节点的输出。rqt_logger_level允许我们在节点运行时更改节点的详细级别(DEBUG,WARN,INFO和ERROR)。
使用方法如下:
1 | rosrun rqt_console rqt_console |
roslaunch启动在启动文件中定义的节点。
1 | #Usage |
使用rosed在ROS中编辑文件
rosed是rosbash套装的一部分。它允许您使用软件包名称直接编辑软件包中的文件,而不必键入软件包的整个路径。
1 | rosed [package_name] [filename] |
这种方法您可以轻松地查看和可选地编辑包中的所有文件,而无需知道其确切的名称。
1 | rosed [package_name] <tab><tab> |
创建ROS msg和srv
这部分将介绍如何创建和构建msg和srv文件以及rosmsg,rossrv和roscp命令行工具。
初学URDF
从这里开始学习URDF,首先构建一个模糊地看起来像R2D2的机器人的视觉模型。
1 | #前提条件 |
第一个简单的URDF例子,这是一个名为myfirst的机器人,它只包含一个关节(a.k.a. part),其视觉分量只是一个圆柱体.6米长,半径为.2米,视觉元素(圆柱)的原点在其几何的中心作为默认值。因此,一半的气缸在网格之下。运行如下
1 | roscd urdf |
现在让我们来看看如何添加多个形状/关节,关节是根据父母和孩子来定义的。 URDF最终是一个具有一个根链路的树结构。这意味着腿的位置取决于base_link的位置。
1 | roslaunch urdf_tutorial display.launch model:=urdf/02-multipleshapes.urdf |
如果要更改原点坐标呢?
关节点Joint的原点是根据父节点的参考帧定义的,分析的时候其余的坐标都是相对关节点而言的。
1 | roslaunch urdf_tutorial display.launch model:=urdf/03-origins.urdf |
怎么给自己的零件着色呢?
身体现在是蓝色的。通过添加第一个材质标签,我们定义了一种名为“蓝色”的新材料,红色,绿色,蓝色和alpha通道分别定义为0,0,.8和1。所有值可以在范围[0,1]内。对于第二条腿,我们可以通过名称来引用材料,因为它以前已经定义。没有人会抱怨,如果你重新定义它。您还可以使用纹理来指定用于对对象着色的图像文件。
如下:
1 | roslaunch urdf_tutorial display.launch model:=urdf/04-materials.urdf |
更多:网格可以以多种不同的格式导入。 STL是相当普遍的,但引擎还支持DAE,它可以有自己的颜色数据,这意味着你不必指定颜色数据。网格也可以使用相对缩放参数或边界框大小来确定大小。
使用URDF构建可移动机器人模型
这部分了解如何在URDF中定义活动关节,关节三种其他重要类型的连接:固定,连续,旋转和棱柱。
1 | roslaunch urdf_tutorial display.launch model:=urdf/06-flexible.urdf gui:=True |
右和左夹爪接头被建模为旋转接头。这意味着它们以与连续关节相同的方式旋转,但是它们具有严格的限制。夹持臂是不同类型的接头…即棱柱形接头。这意味着它沿着一个轴移动,而不是围绕一个轴移动。这种平移运动允许我们的机器人模型延伸和缩回其夹持臂。此外,浮动接头不受约束,并且可以在三个维度中的任一个中移动。
当您在GUI中移动滑块时,模型在Rviz中移动。这是怎么做的?
首先GUI解析URDF并找到所有非固定关节及其限制,然后,它使用滑块的值来发布sensor_msgs / JointState消息。
Anno URDF
1 | rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 map my_frame 100 |
关于Xacro
学习一些技巧,使用Xacro URDF以减少文件中的代码量。主要从三个方面入手:常量、简单数学、宏。在本教程中,我们将查看所有这些快捷方式,以帮助减少URDF文件的整体大小,并使其更易于阅读和维护。语法如下:
1 | rosrun xacro xacro model.xacro > model.urdf |
您还可以在启动文件中自动生成urdf。这是方便的,因为它保持最新,不占用硬盘空间。但是,生成需要时间,因此请注意,启动文件可能需要较长时间才能启动。
1 | <param name="robot_description" |
在URDF文件的顶部,您必须指定一个命名空间,以便正确解析该文件。例如,这些是有效xacro文件的前两行:
1 | <?xml version="1.0"?> |
常量定义:它们可以在任何地方(假设有效的XML),任何级别,使用之前或之后定义。通常他们在顶部。我们使用美元符号和大括号来表示值,而不是在geometry元素中指定实际半径。
1 | <xacro:property name="width" value=".2" /> |
您可以使用四个基本操作(+, - ,*,/),一元减号和括号在$ {}构造中构建任意复杂的表达式。不支持指数和模量。
1 | <cylinder radius="${wheeldiam/2}" length=".1"/> |
宏定义部分:
1 | <xacro:macro name="default_origin"> |
参数化宏:
1 | <xacro:macro name="default_inertial" params="mass"> |
要查看由xacro文件生成的模型,请运行以下命令:roslaunch urdf_tutorial xacrodisplay.launch model:=urdf/08-macroed.urdf.xacro
解析PR2 Robot URDF
本教程解释了复杂机器人(如PR2)的顶级URDF Xacro文件的布局。完整的PR2 URDF宏文件可以在文件robots / pr2.urdf.xacro中的pr2_description包中找到。
包括用于单个机器人组件的包含xacro宏的文件。这就像在C中包含一个头文件:它设置了一堆定义,但实际上不调用它们。
建立自己的Robot URDF
1 | vi my_robot.urdf |
现在我们有了基本的树结构,让我们添加适当的维度。包括关节的定位与旋转轴的设定。最后转换成PDF进行查看。
1 | urdf_to_graphiz my_robot.urdf |
Moveit
安装
安装ROS Indigo,Jade或Kinetic。请确保您已遵循所有步骤并安装了最新版本的软件包。
1 | rosdep update |
从catkin工作区的/ src目录中拉下所需的存储库和编译。
1 | wstool init . |
另外关于moveit的源码介绍看这里,为了完整性,以下两个回合是可以找到文档的地方:
- moveit.ros.org - 这个主要网站
- moveit_tutorials - 一步一步学习MoveIt的例子!
- moveit_kinematics_tests - 带测试的实验性repo
RViz
基于GUI的界面可通过使用MoveIt! Rviz(ROS Visualizer)插件,该插件允许您设置机器人的工作场景,生成计划,可视化输出和直接与可视化的机器人交互。
你应该已经完成了MoveIt!安装助手教程,如果没有,安装如下,Setup Assistant是一个图形用户界面,用于配置与MoveIt一起使用的任何机器人!
1 | roslaunch moveit_setup_assistant setup_assistant.launch |
注意:配置anno机械臂时,将package包文件夹robot_anno_v6移动到/opt/ros/kinetic/share或ws_moveit,然后加载/opt/ros/kinetic/share/robot_anno_v6/urdf/RobotAnnoV6.urdf文件进行配置。或者建立自己的catkin_ws,里面放自己的package。
在添加arm的时候,不要把forearm_cam_frame_joint加进去了!
安装配置完成后,继续进行RViz Plugin。
1 | mv ~/pr2_moveit_generated ~/kinetic_workspace/sandbox |
在上面这个界面的使用过程中,可以移动手臂,并能追踪移动的整个轨迹过程。
您现在可以开始使用MoveIt!在Gazebo中模拟机器人。
MoveIt! 设计用于真实和模拟机器人。这部分了解如何配置MoveIt!用于PR2上的控制器,还将学习如何将传感器集成到PR2上与MoveIt!
1 | #前提条件 |
上面的gazo包过时了,有些操作不一定可用,更多参考gazebo_ros_pkgs。
gazebo_ros_pkgs是一组ROS包,它们提供必要的接口来在机器人的Gazebo 3D刚体模拟器中模拟机器人。它使用ROS消息,服务和动态重新配置与ROS集成。
Move Group Interface
首先看一个轨迹视频,下面仔细分析是怎么做到的?参考Move Group Interface Tutorial。
1 | cd ~/ws_moveit/src |
具体程序源码分析见原文,主要为Setup、Visualization、获取基本信息、Planning to a Pose goal、可视化计划、移动到姿势目标、规划联合空间目标、规划与路径约束、笛卡尔路径、添加/删除对象和附加/分离对象、双臂姿势目标。
Move Group Python Interface
主用户是通过RobotCommander类进行交互,它为用户可能想要执行的大多数操作提供功能,特别是设置关节或姿势目标,创建运动计划,移动机器人,将对象添加到环境中以及从机器人附加/分离对象。
例程分析见如下,源码里面也有响应的代码解读。
1 | cd ~/ws_moveit/src/moveit_tutorials |
这一部分跟上一部分的源码分析差不多,可以参考着进行分析,只是整个定义了一个python函数move_group_python_interface_tutorial,最后运行main函数即可,其中launch文件见~/ws_moveit/src/moveit_tutorials/doc/pr2_tutorials/planning/launch/move_group_python_interface_tutorial.launch。
1 | chmod +x ~/ws_moveit/src/moveit_tutorials/doc/pr2_tutorials/planning/scripts/move_group_python_interface_tutorial.py |
在Rviz中,可以看到如程序中安排的输出情况。
Kinematic Model Tutorial
在本节中,将介绍通过C ++ API使用运动学。RobotModel和RobotState类是允许访问运动学的核心类。具体内容见原网页,这部分介绍到了IK和FK。
1 | #例程原函数 |
对该CPP文件的编译参考源码编译,如果要运行该段程序,需要launch做的事情:
- 将PR2 URDF和SRDF上传到param服务器。
- 将kinematics_solver配置上传到ROS param服务器。
最后运行如下:
1 | roslaunch moveit_tutorials kinematic_model_tutorial.launch |
rosserial_arduino
本部分介绍如何设置Arduino IDE来使用rosserial。rosserial提供了一个ROS通信协议,使用你的Arduino的UART工作。它允许您的Arduino成为一个完整的ROS节点,可以直接发布和订阅ROS消息,发布TF变换,并获得ROS系统时间。
我们的ROS绑定实现为Arduino库。像所有的Arduino库一样,ros_lib的工作原理是把它的库实现放到你的素描本的libraries文件夹中。
为了在你自己的代码中使用rosserial库,你必须先放
1 | #include <ros.h> |
安装
1 | sudo apt-get install ros-kinetic-rosserial-arduino |
前面的安装步骤创建ros_lib,它必须复制到Arduino构建环境中,以使Arduino程序与ROS交互。现在你已经从源代码或debs安装,所有你需要做的是将rosserial_arduino / libraries目录复制到你的Arduino sketchbook。
1 | cd /opt/arduino-1.6.7/libraries |
重新启动IDE后,您应该看到ros_lib列在示例下:
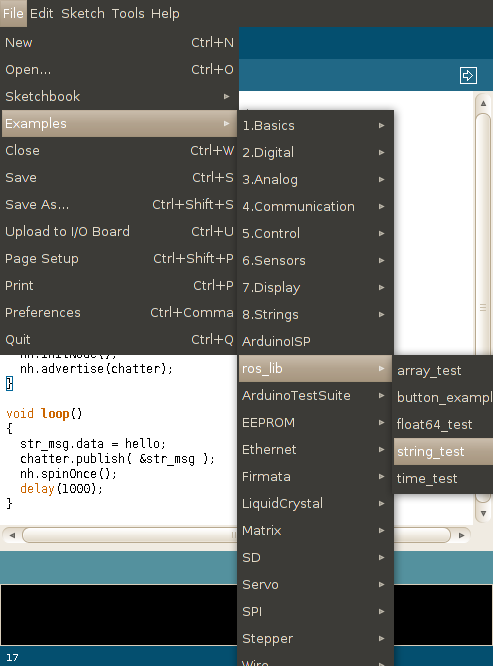
hello world
我们将开始探索rosserial,为我们的Arduino创建一个“hello world”程序。选择示例-ros_lib-HelloWorld,进行编译上传,如果编译不通过,检查roslib创建的是否有问题。然后分别在各个窗口输入:
1 | roscore |